|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
Loading...
Searching...
No Matches
|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
A kinematics class for articulated (6-axis) robot arm Artic implement the kinematics of articulated (6-axis) robot arm. More...
#include <artic.h>
Public Member Functions | |
| Artic () | |
| Default Constructor. | |
| Artic (const rb::math::VectorX &a0, const rb::math::VectorX &alpha0, const rb::math::VectorX &d0, const rb::math::VectorX &ini_theta, const rb::math::VectorX &uplimit0, const rb::math::VectorX &lowlimit0) | |
| Constructor with certain robot arm data. | |
| Artic (std::vector< std::unique_ptr< rb::kin::Link > > &links, rb::math::Matrix4 base=rb::math::Matrix4::Identity(), rb::math::Matrix4 tool=rb::math::Matrix4::Identity(), rb::math::Vector3 gravity=rb::math::Vector3(0., 0., rb::math::GRAVITY), std::string manufactor="None", std::string model="None") | |
| Constructor with a Links vector and other parameter. | |
| ~Artic () | |
| Destructor. | |
| ArmPose | forwardKin (const rb::math::VectorX &q, const bool update=true) override |
| Compute forward Kinematics for given angle, update each joint value, and return current current position and orientation of TCP. | |
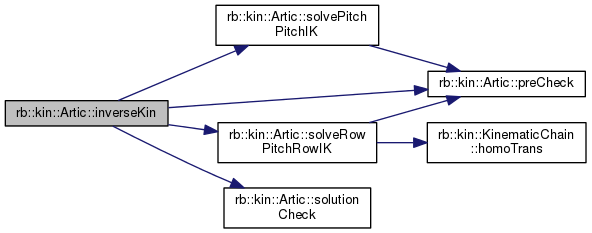
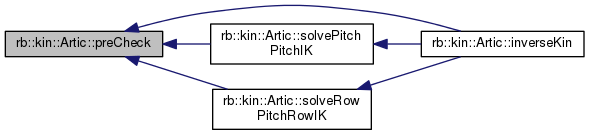
| IK_RESULT | inverseKin (const rb::math::Matrix4 &world_tcp_tf, rb::math::VectorX &joints, ArmAxisValue &all_sols) override |
| Compute inverse kinematics for given transformation matrix of TCP in Cartesian coordination system. | |
| IK_RESULT | inverseKin (const double &x, const double &y, const double &z, const double &roll, const double &pitch, const double &yaw, rb::math::VectorX &joints, ArmAxisValue &all_sols) |
| Compute inverse kinematics for given position and orientation in Cartesian coordination system. | |
| void | solvePitchPitchIK (const double &th1_rad, const rb::math::Vector4 &p0, const std::vector< bool > &config, ArmAxisValue &all_sols) |
| Compute inverse kinematics for two links (pitch-pitch) structure by given first joint. | |
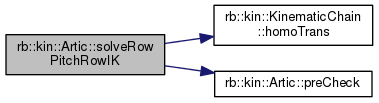
| void | solveRowPitchRowIK (const double &th1_rad, const std::vector< bool > &config, const rb::math::Matrix4 &flange_tr, ArmAxisValue &all_sols) |
| Compute inverse kinematics for wrist mechanism (row-pitch-row) structure by given first joint. | |
| IK_RESULT | solutionCheck (ArmAxisValue &sols) |
| Find the solutions in all_sols that is most fit to previous joints value. | |
| void | preCheck (const int &njoint, double &rad) |
| Check the value of individual joint depend join limits. | |
| ArmPose | getArmPose (void) const |
| Get the position and orientation of the flange of robot arm. | |
| rb::math::VectorX | getA (void) const |
Get the link length a value between each joint of the robot arm. | |
| rb::math::VectorX | getAlpha (void) const |
Get the link twist  | |
| rb::math::VectorX | getD (void) const |
Get the link offset d value between each joint of the robot arm. | |
| rb::math::VectorX | getTheta (void) const |
Get the joint angle  | |
| void | setUpLimit (rb::math::VectorX &up_lim) |
| Set the upper limits of joint angles for the robot arm. | |
| rb::math::VectorX | getUpLimit (void) const |
| Get the upper limits of joint angles of the robot arm. | |
| void | setLowLimit (rb::math::VectorX &low_lim) |
| Set the lower limits of joint angles for the robot arm. | |
| rb::math::VectorX | getLowLimit (void) const |
| Get the lower limits of joint angles of the robot arm. | |
| rb::kin::ArmPose | getJointPos (const int &jnt) |
| Get the position and orientation of the certain robot joint. | |
| rb::math::Matrix4 | getJointFrame (const int &jnt) |
| Get the HT matrix of the certain robot joint. | |
 Public Member Functions inherited from rb::kin::KinematicChain Public Member Functions inherited from rb::kin::KinematicChain | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | KinematicChain () |
| Default Constuctor. | |
| KinematicChain (std::vector< std::unique_ptr< rb::kin::Link > > &links, rb::math::Matrix4 base=rb::math::Matrix4::Identity(), rb::math::Matrix4 tool=rb::math::Matrix4::Identity(), rb::math::Vector3 gravity=rb::math::Vector3(0., 0., rb::math::GRAVITY), std::string manufactor="None", std::string model="None") | |
| Constructor with a Links vector and other parameter. | |
| virtual | ~KinematicChain () |
| Destructor. | |
| rb::math::Matrix4 | homoTrans (double &A, double &alpha, double &D, const double &theta) |
| Compute homogeneous transformation matrix for given link properties, and return the matrix. | |
| bool | setTool (const ArmPose &tool_pose) |
| Set the HT matrix of the offset b/w the arm flange and equipped tool or end-effector. | |
| bool | getTool (ArmPose &tool_pose) const |
| Get the HT matrix of the offset b/w the arm flange and equipped tool or end-effector. | |
| void | setBase (const rb::math::Matrix4 &base) |
| Set the Homogeneous Transformation matrix of the working base of the robot arm. | |
| rb::math::Matrix4 | getBase (void) const |
| Get the HT matrix of the working base of the robot arm. | |
| rb::math::Matrix4 | getTCP (void) const |
| Get the HT matrix of TCP w.r.t world coordination. | |
| void | setDOF (void) |
| Set the degree of freedom according to the property of links. | |
| int | getDOF (void) const |
| Get the degree of freedom of this kinematic chain. | |
Protected Attributes | |
| rb::math::VectorX | a |
| Link length data member of modified D-H parameter for robot arm. | |
| rb::math::VectorX | alpha |
| Link twist data member of modified D-H parameter for robot arm. | |
| rb::math::VectorX | d |
| Link offset data member of modified D-H parameter for robot arm. | |
| rb::math::VectorX | theta |
| Joint angle data member of modified D-H parameter for robot arm. | |
| rb::math::VectorX | up_lim_ |
| Upper limit of all joints. | |
| rb::math::VectorX | low_lim_ |
| Lower limit of all joints. | |
| Protected Attributes inherited from rb::kin::KinematicChain | |
| std::vector< std::unique_ptr< rb::kin::Link > > | links_ |
| A vector of Link class. | |
| std::vector< rb::math::Matrix4 > | frames_ |
| int | dof_ |
| A integer indicates the degree of freedom. | |
| rb::math::Matrix4 | base_tf_ |
| HT matrix of robot base with respected to world coordination. | |
| rb::math::Matrix4 | tool_tf_ |
| HT matrix of TCP with respected to robot flange (last joint) | |
| rb::math::Matrix4 | world_tcp_tf_ |
| HT matrix of TCP with respected to world coordination. | |
| rb::math::Vector3 | gravity_ |
| Gravity set as a vector. | |
| std::string | manufactor_ |
| the name of manufactor of the robot | |
| std::string | model_ |
| the model of the robot named by its manufactor | |
A kinematics class for articulated (6-axis) robot arm Artic implement the kinematics of articulated (6-axis) robot arm.
| rb::kin::Artic::Artic | ( | const rb::math::VectorX & | a0, |
| const rb::math::VectorX & | alpha0, | ||
| const rb::math::VectorX & | d0, | ||
| const rb::math::VectorX & | ini_theta, | ||
| const rb::math::VectorX & | uplimit0, | ||
| const rb::math::VectorX & | lowlimit0 | ||
| ) |
Constructor with certain robot arm data.
| a0 | Link length of all links (mm) |
| alpha0 | Twist angle of all links (degree) |
| d0 | Link offset of all links (mm) |
| ini_theta | Initial value of all joint angles |
| uplimit0 | Upper limit of all joints |
| lowlimit0 | Lower limit of all joints |
| rb::kin::Artic::Artic | ( | std::vector< std::unique_ptr< rb::kin::Link > > & | links, |
| rb::math::Matrix4 | base = rb::math::Matrix4::Identity(), |
||
| rb::math::Matrix4 | tool = rb::math::Matrix4::Identity(), |
||
| rb::math::Vector3 | gravity = rb::math::Vector3(0., 0., rb::math::GRAVITY), |
||
| std::string | manufactor = "None", |
||
| std::string | model = "None" |
||
| ) |
Constructor with a Links vector and other parameter.
| links | A vector of link that construct the articulated robot arm |
| base | HT matrix of robot base with respected to world coordination |
| tool | HT matrix of TCP with respected to robot flange (last joint) |
| gravity | Gravity set as a vector. |
| manufactor | the name of manufactor of the robot |
| model | the model of the robot named by its manufactor |
|
overridevirtual |
Compute forward Kinematics for given angle, update each joint value, and return current current position and orientation of TCP.
| q | An array of joint degree. |
| update | A boolean to check if update the value of joints and frames. |
Reimplemented from rb::kin::KinematicChain.

| rb::math::VectorX rb::kin::Artic::getA | ( | void | ) | const |
Get the link length a value between each joint of the robot arm.
| rb::math::VectorX rb::kin::Artic::getAlpha | ( | void | ) | const |
Get the link twist
| ArmPose rb::kin::Artic::getArmPose | ( | void | ) | const |
Get the position and orientation of the flange of robot arm.
| rb::math::VectorX rb::kin::Artic::getD | ( | void | ) | const |
Get the link offset d value between each joint of the robot arm.
| rb::math::Matrix4 rb::kin::Artic::getJointFrame | ( | const int & | jnt | ) |
Get the HT matrix of the certain robot joint.
| rb::kin::ArmPose rb::kin::Artic::getJointPos | ( | const int & | jnt | ) |
Get the position and orientation of the certain robot joint.

| rb::math::VectorX rb::kin::Artic::getLowLimit | ( | void | ) | const |
Get the lower limits of joint angles of the robot arm.
| rb::math::VectorX rb::kin::Artic::getTheta | ( | void | ) | const |
Get the joint angle
| rb::math::VectorX rb::kin::Artic::getUpLimit | ( | void | ) | const |
Get the upper limits of joint angles of the robot arm.
| IK_RESULT rb::kin::Artic::inverseKin | ( | const double & | x, |
| const double & | y, | ||
| const double & | z, | ||
| const double & | roll, | ||
| const double & | pitch, | ||
| const double & | yaw, | ||
| rb::math::VectorX & | joints, | ||
| ArmAxisValue & | all_sols | ||
| ) |
Compute inverse kinematics for given position and orientation in Cartesian coordination system.
| x | x value of the position. |
| y | y value of the position. |
| z | z value of the position. |
| roll | roll value of the orientation. |
| pitch | pitch value of the orientation. |
| yaw | yaw value of the orientation. |
| joints | the best fittest IK solution. |
| all_sols | a data structure to store all possible solutions. |

|
overridevirtual |
Compute inverse kinematics for given transformation matrix of TCP in Cartesian coordination system.
| world_tcp_tf | Transformation of tcp in world coordination. |
| joints | The best fittest solution. |
| all_sols | A data structure to store all possible solutions. |
Implements rb::kin::KinematicChain.
| void rb::kin::Artic::preCheck | ( | const int & | njoint, |
| double & | rad | ||
| ) |
Check the value of individual joint depend join limits.
Will map map the value to corrected range if possible.
| njoint | index of joint indicate which joint is examined. |
| rad | the value of joint will be check and update as output. |
| void rb::kin::Artic::setLowLimit | ( | rb::math::VectorX & | low_lim | ) |
Set the lower limits of joint angles for the robot arm.
| low_lim | An rb::math::VectorX contain the lower limit of all joints. |
| void rb::kin::Artic::setUpLimit | ( | rb::math::VectorX & | up_lim | ) |
Set the upper limits of joint angles for the robot arm.
| up_lim | An rb::math::VectorX contain the upper limit of all joints. |
| IK_RESULT rb::kin::Artic::solutionCheck | ( | ArmAxisValue & | sols | ) |
Find the solutions in all_sols that is most fit to previous joints value.
| sols | a structure to storage all possible solutions of inverse kinematics. |

| void rb::kin::Artic::solvePitchPitchIK | ( | const double & | th1_rad, |
| const rb::math::Vector4 & | p0, | ||
| const std::vector< bool > & | config, | ||
| ArmAxisValue & | all_sols | ||
| ) |
Compute inverse kinematics for two links (pitch-pitch) structure by given first joint.
| th1_rad | angle (radian) of first joint. |
| p0 | the position of wrist point wrt joint 0 (base) |
| config | a vector of 3 bits to indicator 8 configuration (solutions) of robot arm. |
| all_sols |


| void rb::kin::Artic::solveRowPitchRowIK | ( | const double & | th1_rad, |
| const std::vector< bool > & | config, | ||
| const rb::math::Matrix4 & | flange_tr, | ||
| ArmAxisValue & | all_sols | ||
| ) |
Compute inverse kinematics for wrist mechanism (row-pitch-row) structure by given first joint.
| th1_rad | angle (radian) of first joint. |
| config | a vector of 3 bits to indicator 8 configuration (solutions) of robot arm. |
| flange_tr | a H.T. Matrix of robot flange with respect to it base. |
| all_sols | a structure to storage all possible solutions of inverse kinematics. |

|
protected |
|
protected |
|
protected |
|
protected |
Joint angle data member of modified D-H parameter for robot arm.
Joint angle (degree)