|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
Loading...
Searching...
No Matches
|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
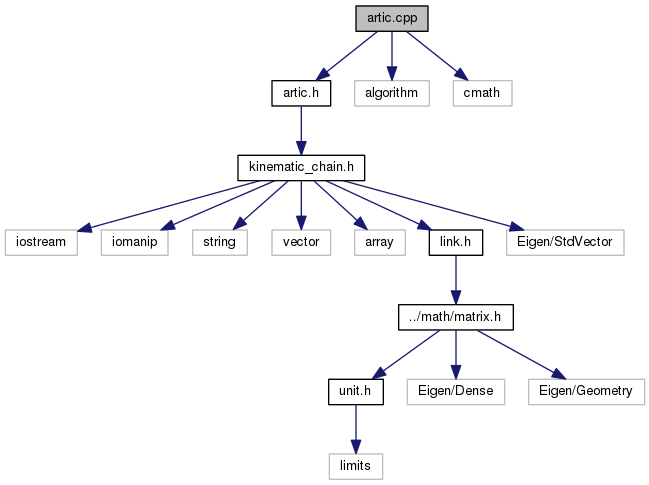
General robot arm Kinematic application. More...
Namespaces | |
| namespace | rb |
| Robot Arm Library namespace. | |
| namespace | rb::kin |
| Kinematics module namespace. | |
General robot arm Kinematic application.