|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
Loading...
Searching...
No Matches
|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
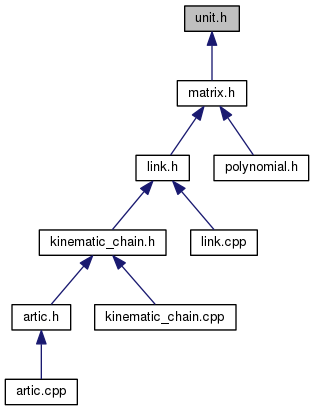
A head file for converting units. More...
#include <limits>
Go to the source code of this file.
Namespaces | |
| namespace | rb |
| Robot Arm Library namespace. | |
| namespace | rb::math |
| math module namespace | |
Variables | |
| static const double | rb::math::PI = 3.1415926535897932384626433832795 |
| Constant to present value of pi (more precise). | |
| static const double | rb::math::RAD2DEG = 57.295779513082320876798154814105 |
| Constant to present converting from radian to degree. | |
| static const double | rb::math::DEG2RAD = 0.01745329251994329576923690768489 |
| Constant to present converting from degree to radian. | |
| static const double | rb::math::EPSILON = std::numeric_limits<float>::epsilon() |
| Constant as critera if some variable close enough to zero. | |
| static const double | rb::math::GRAVITY = 0.980665 |
| Constant to present value of gravity. | |
A head file for converting units.