|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
Loading...
Searching...
No Matches
|
RobotArmLib 0.0.6
Robot Arm Library [WIP]
|
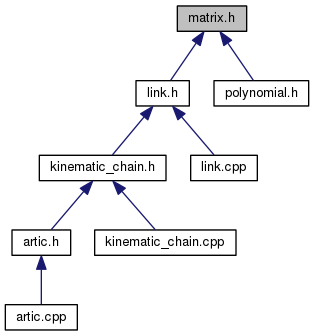
A head file define tpyes, and function for matrix manipulating. More...
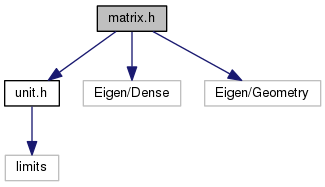
Go to the source code of this file.
Namespaces | |
| namespace | rb |
| Robot Arm Library namespace. | |
| namespace | rb::math |
| math module namespace | |
Typedefs | |
| typedef Eigen::MatrixXd | rb::math::MatrixX |
| make MatrixX as alias of Eigen::MatrixXd | |
| typedef Eigen::Matrix3d | rb::math::Matrix3 |
| make Matrix3 as alias of Eigen::Matrix3d | |
| typedef Eigen::Matrix4d | rb::math::Matrix4 |
| make Matrix4 as alias of Eigen::Matrix4d | |
| typedef Eigen::VectorXd | rb::math::VectorX |
| make VectorX as alias of Eigen::VectorXd | |
| typedef Eigen::Vector3d | rb::math::Vector3 |
| make Vector3 as alias of Eigen::Vector3d | |
| typedef Eigen::Vector4d | rb::math::Vector4 |
| make Vector4 as alias of Eigen::Vector4d | |
| typedef Eigen::AngleAxisd | rb::math::AngleAxis |
| make AngleAxis as alias of Eigen::AngleAxisd | |
| template<typename T , size_t R, size_t C> | |
| using | rb::math::Array = Eigen::Array< T, R, C > |
| make Array as alias of Eigen::Array (class template) | |
| typedef Eigen::Array< double, 6, 1 > | rb::math::Array6 |
| make Array6 as alias of Eigen::Array<double, 6, 1> | |
Functions | |
| Matrix4 | rb::math::homoTrans (const double &A, const double &alpha, const double &D, const double theta) |
| Compute homogeneous transformation matrix for given link properties, and return the matrix. | |
| Matrix4 | rb::math::rotateX (const double &rad) |
| Compute rotation matrix about X axis for given angle in radians. | |
| Matrix4 | rb::math::rotateY (const double &rad) |
| Compute rotation matrix about Y axis for given angle in radians. | |
| Matrix4 | rb::math::rotateZ (const double &rad) |
| Compute rotation matrix about Z axis for given angle in radians. | |
| void | rb::math::tr2rpy (const Matrix4 &m, double &roll_z, double &pitch_y, double &yaw_x) |
| Extract Roll-Pitch-Yaw (Z-Y-X Euler) angles in radians from a homogeneous transformation matrix. | |
| void | rb::math::rpy2tr (const double &roll_z, const double &pitch_y, const double &yaw_x, Matrix4 &out) |
| Build a homogeneous transformation matrix from Roll-Pitch-Yaw angles (Z-Y-X Euler) given in radians. | |
A head file define tpyes, and function for matrix manipulating.