Demo of PMC Robot Teach Pendant
Demo of PMC Robot Teach Pendant
This is a beta version of teach pendant of PMC Robot Controller.
The hardware (6.5” touch screen with physical buttons) is bought from IEI, and we use it to implement the user interface of teach pendant.

I, as a project leader, mentor junior engineer to develop user interface of teach pendant and use Git to control software version & record our progress. Meanwhile, I focus on improving the real-time system of controller (manual mode and message alarm).
Basically, this teach pendant has three modes:
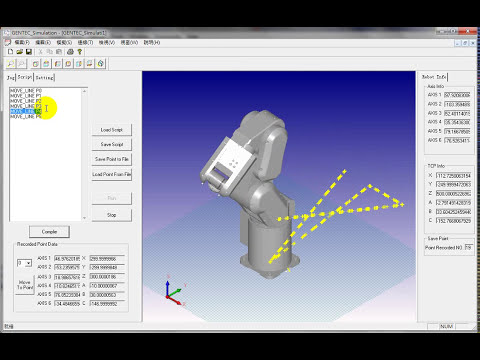
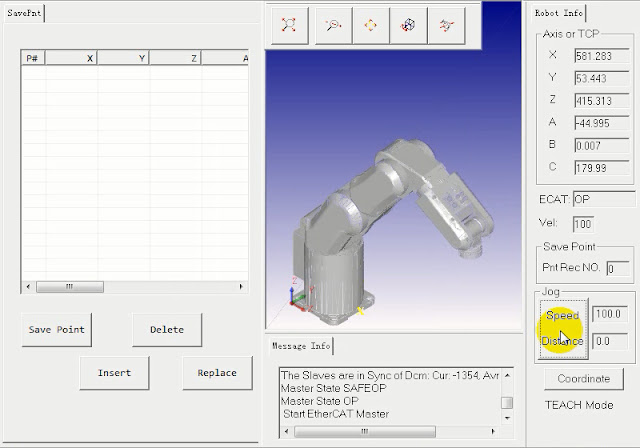
- Teach mode: user can move (jog) robot arm step by step with certain distance and speed in joint-space or Cartesian-space. User can record positions they want for composing motion script later.
(Please watch above video from 25 sec to 55 sec)
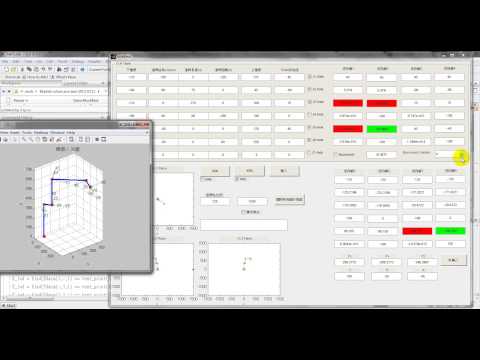
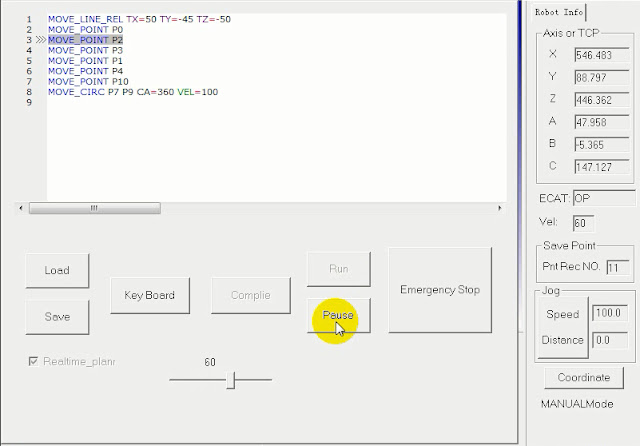
- Manual mode: user can use PMC robot language to edit motion script of robot arm and run scripts manually (one by one command line. Please watch above video from 1:37 to 2:10 for more detail)
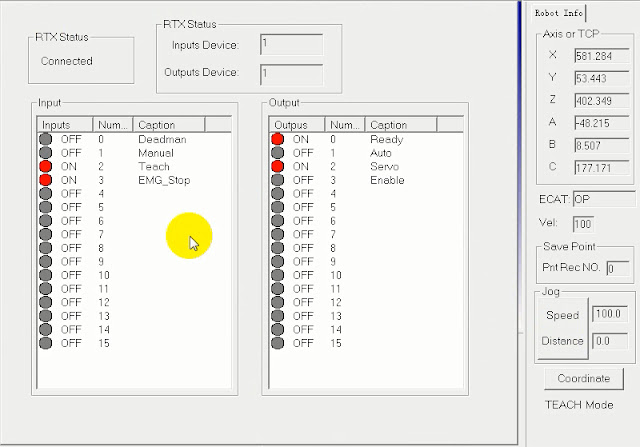
- Auto mode: Similar as manual mode, but user can run script continually. (Please watch above video from 2:15 to 2:40 for more detail.) It also has pages to monitor I/O condition, display message from real-time system and setting tool & base. (Please watch above video from 1:02 sec to 1:08 sec for more detail)
Also, I use Scintilla API to enhance the interface of PMC Robot Language Editor.
I also wrote the proposal and acquired funding from Taiwan Government for this project.
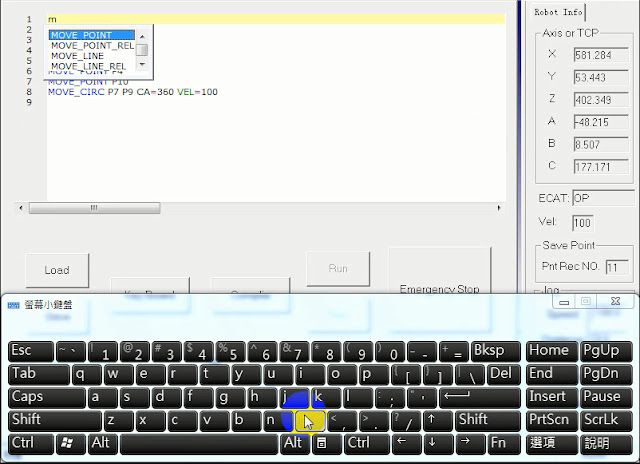
Please watch above video from 1:12 sec to 1:36 sec for more detail about the process of editing robot command.