PMC 14-axis Industrial Dual-Arm Robot
PMC 14-axis Industrial Dual-Arm Robot
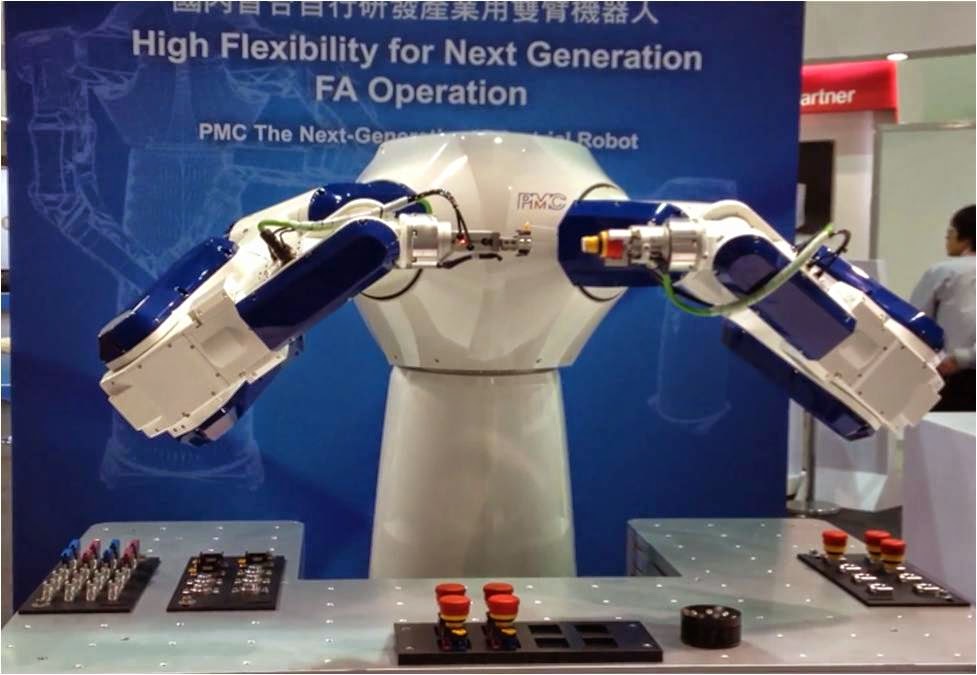
This is a 14-axis Industrial Dual-Arm Robot created by Precision Machinery Research & Development Center (PMC). It is also the first industrial robot built from Taiwan. It has humanoid arms to accomplish complicated tasks with high flexibility targeted for industrial use.
This newly designed robot, PMC 14-axis dual-arm robot, has exhibited in 2014 “Taiwan Automation Intelligence and Robot Show” (TAIROS, the biggest exhibition in Taiwan).
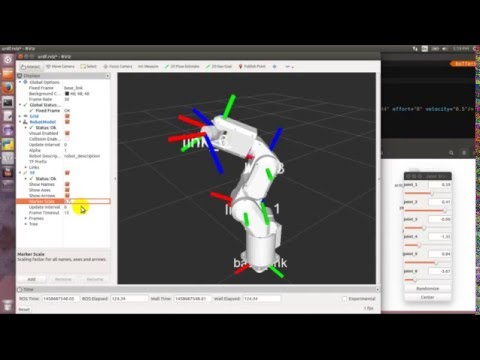
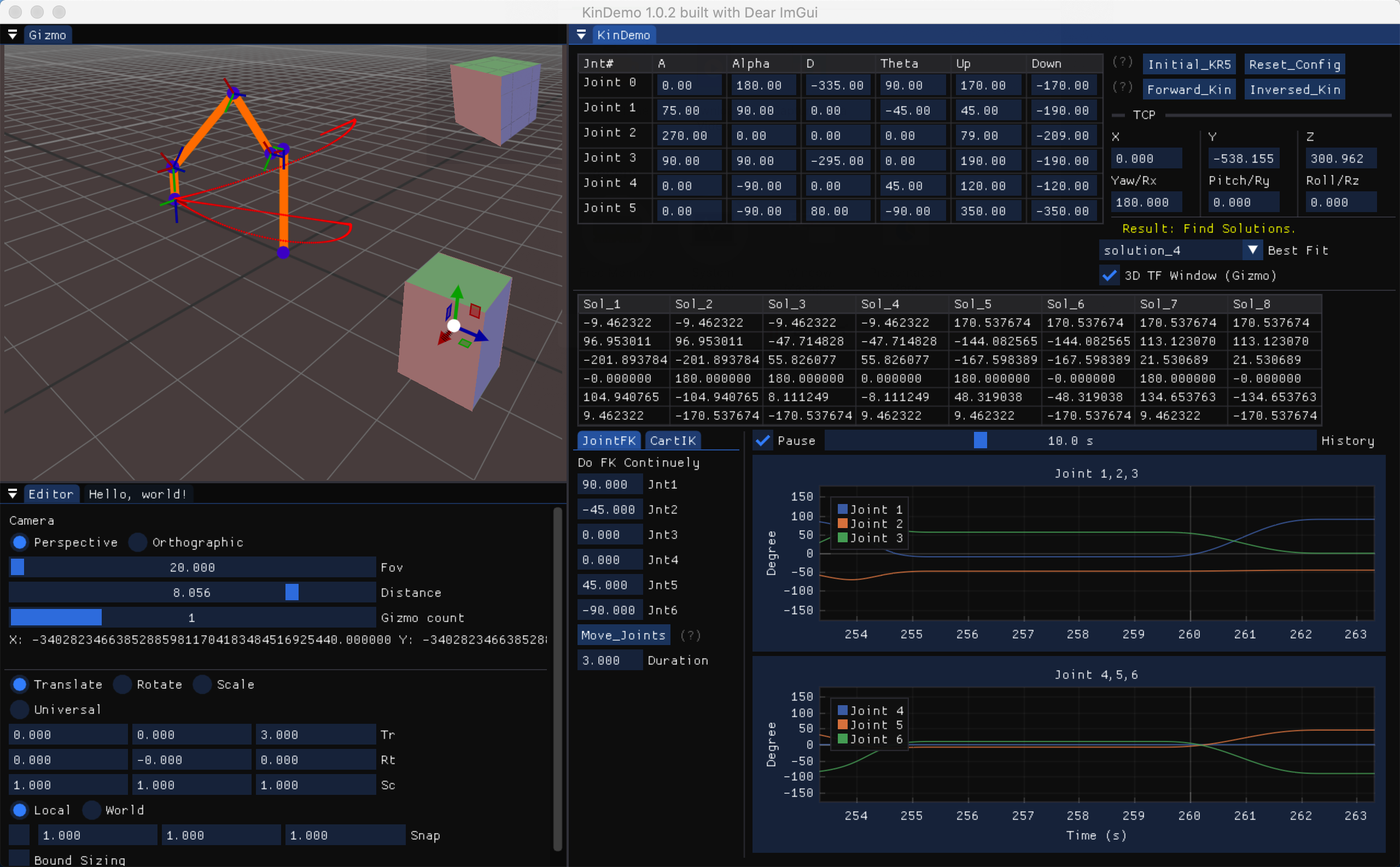
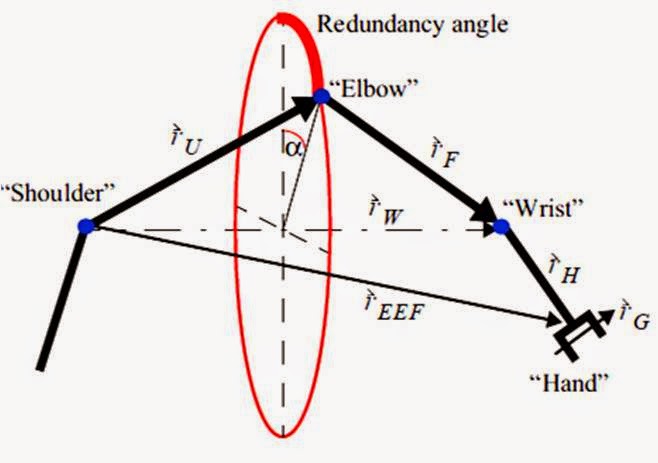
In this project, I developed closed-form inverse kinematic algorithm for redundant (7-axis) robot arm in order to let each robot arm has a high degree of freedom like the human arm.(detail)
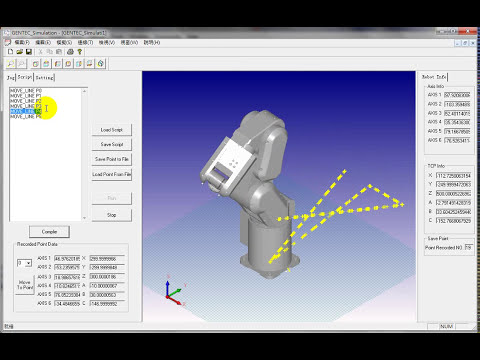
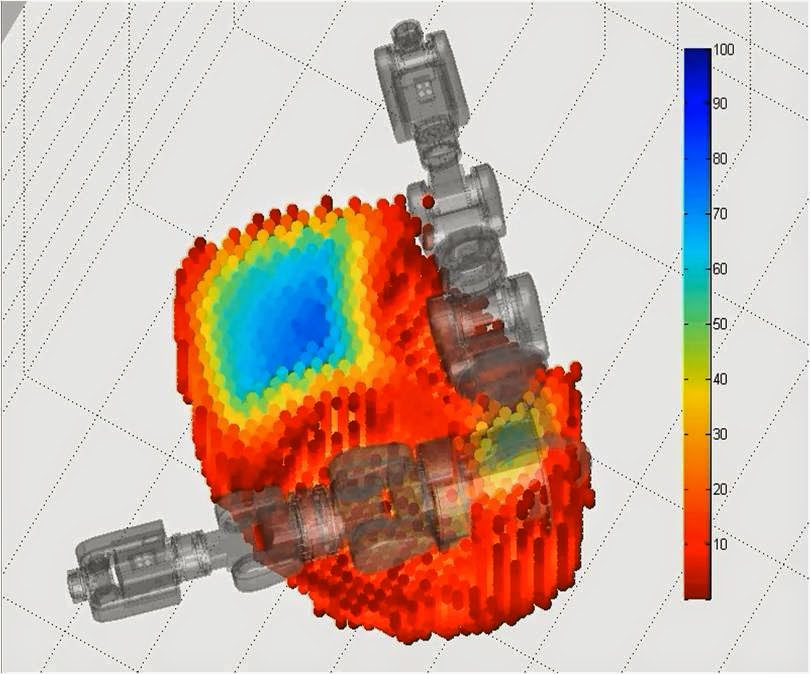
The reachability map was adapted here to design the configuration of a dual-arm robot by adjusting the distance and the angle between its two arms. The reachability map, published by the researchers in German Aerospace Center (DLR), is a method to quantify the ability of a robot arm to reach each position inside its workspace.(detail)
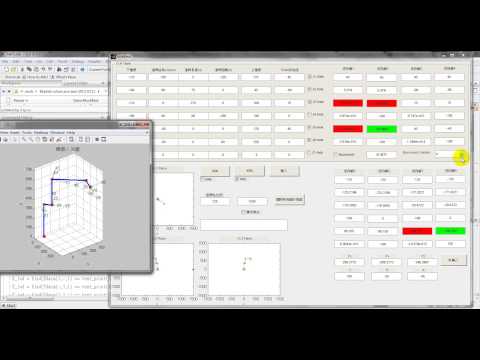
I also worked on developing the multi-robot control cooperative functions in the real-time system for our dual-arm robot. The cooperative functions include:
Synchronization
- Program Synchronization
Geometric Coupling
- Load Sharing
- Master/Slave
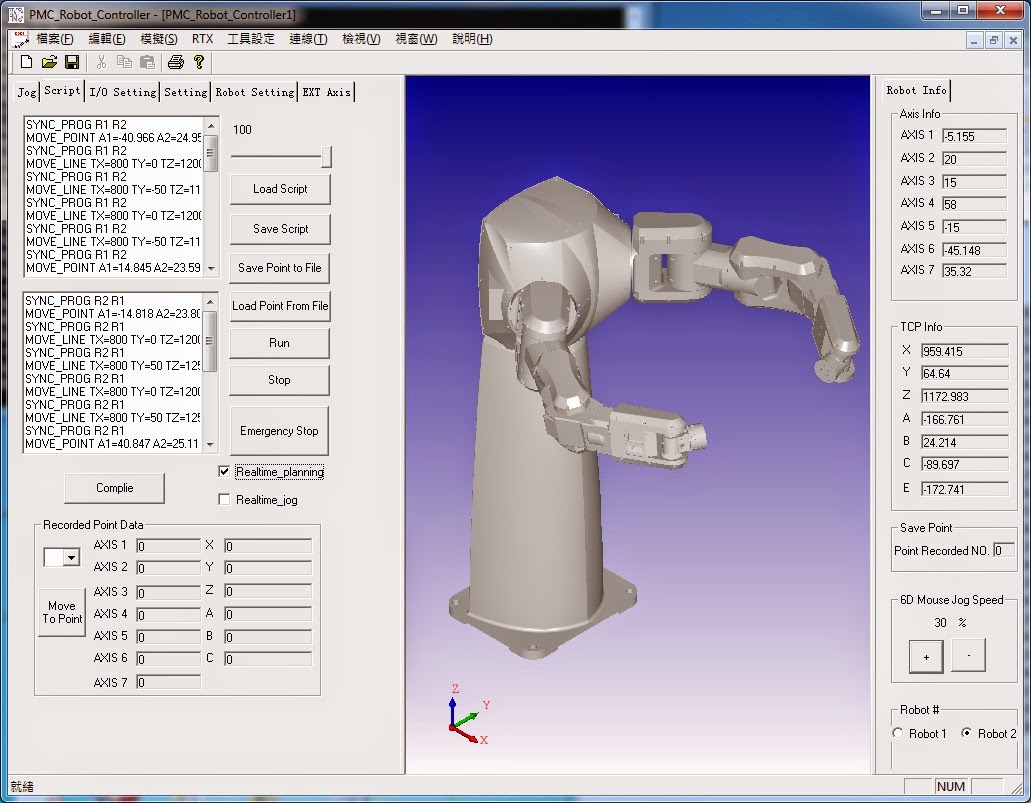
In addition, I used open source CAD kernel “Open CASCADE” to render virtual robots inside the Human Machine interface of our robot controller.
Furthermore, I extend PMC real-time controller to control three robots in one PC-Based Controller, and I use three robots to perform Load Sharing & Master/Slave together.
(Exhibited in 2015 TAIROS)