Controlling iRobot Create with Matlab
Controlling iRobot Create with Matlab
It is a self-study case. This case refers to first homework project of COMS W4733 COMPUTATIONAL ASPECTS OF ROBOTICS taught by Prof. Peter Allen at Columbia University.
I use iRobot Open Interface to create a GUI interface in Matlab to control iRobot Create. The interface takes serial commands from a remote computer and executes them on the robot, returning sensor data as required. In addition, Professor Joel Esposito and Owen Barton at the United States Naval Academy had made a Matlab toolbox for iRobot Create. Therefore, I can use or modified their code to fit with my GUI program.
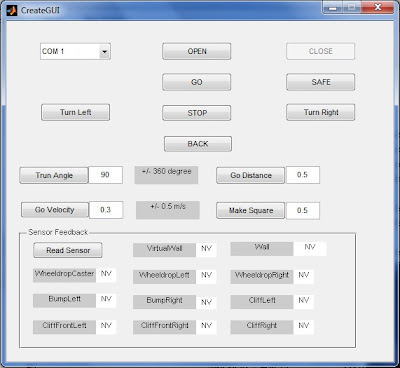
This Matlab program does those functions:
- Open - open the COM port for serial communication (unable when connecting)
- Close - close the COM port for serial communication (unable when disconnecting)
- Safe - set iRobot Create to Safe Mode
- Go and Back - move forward and Back
- Stop
- Turn left and right
- Turn Angle - let robot turn the angle (in degree) inputted by user
- Go Distance - let robot move the distance (in meter) inputted by user
- Go Velocity - let robot move in certain speed seted by user
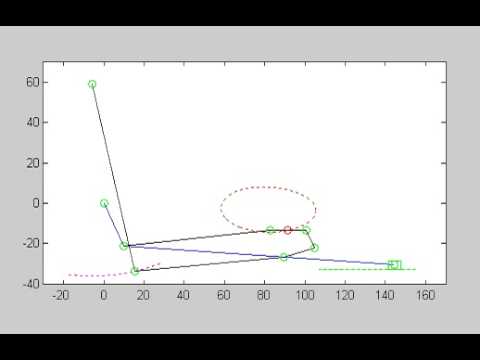
- Make Square - let robot drive in square whose side is decided by suer
- Read Sensor - Read and Display the state of the wheel, bumper, virtual wall, and cliff sensors (binary) and read and display the value of the wall signal sensor (0-4095).
The films of Create GUI:
Please start screen view in 2nd second and robot view in 0 second.
本部落格所有文章除特別聲明外,均採用 CC BY-NC-SA 4.0 許可協議。轉載請註明來自 Robin Chen's Blog!
相關推薦


評論