Demonstration of PMC Robot Simulator
Demonstration of PMC Robot SimulatorIn Precision Machinery Research and Development Center (PMC), I also work on developing simulators for our industrial robots.
It is also the human machine interface (HMI) of our industrial robot, such as serial robot arm, SCARA robot, Delta robot.
Articulated Robot Arm
SCARA Robot
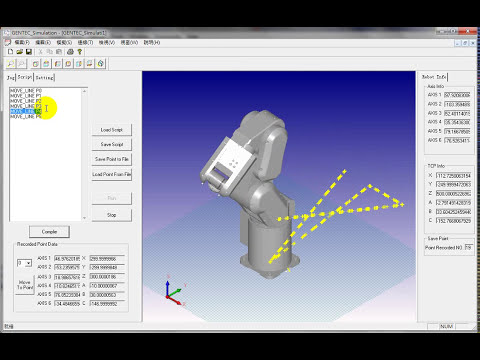
The simulator is written in C++, and its graphical user interface (GUI) is developed with MFC. The purpose of this simulator is to work as the teaching panel of ...
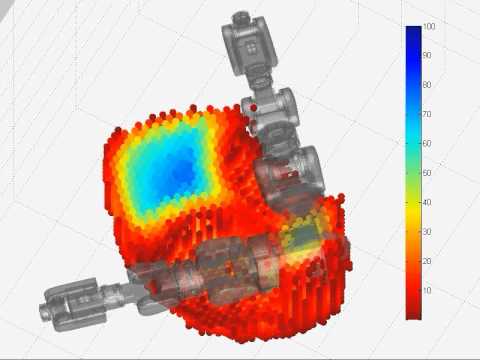
Visualization of Kinematic Capability of Robot Arm: Reachability Map
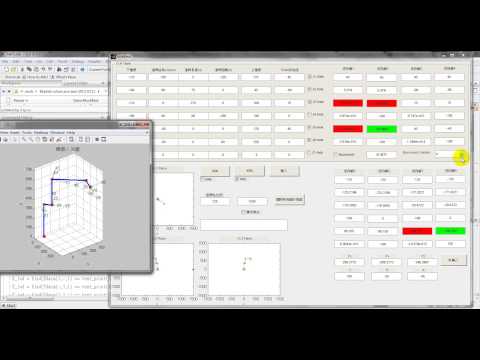
Visualization of Kinematic Capability of Robot Arm: Reachability MapIn order to analyze the capability of robot arms, such as PMC1 robot arm, I re-implement the method called Reachability Map in MATLAB.
This method, proposed by researchers in German Aerospace Center (DLR), is to analyze how well do robot arm can reach each local area of whole workspace in how many orientations. The concept is to divide whole workspace of robot arm into several subregion and use following step to compute the ...

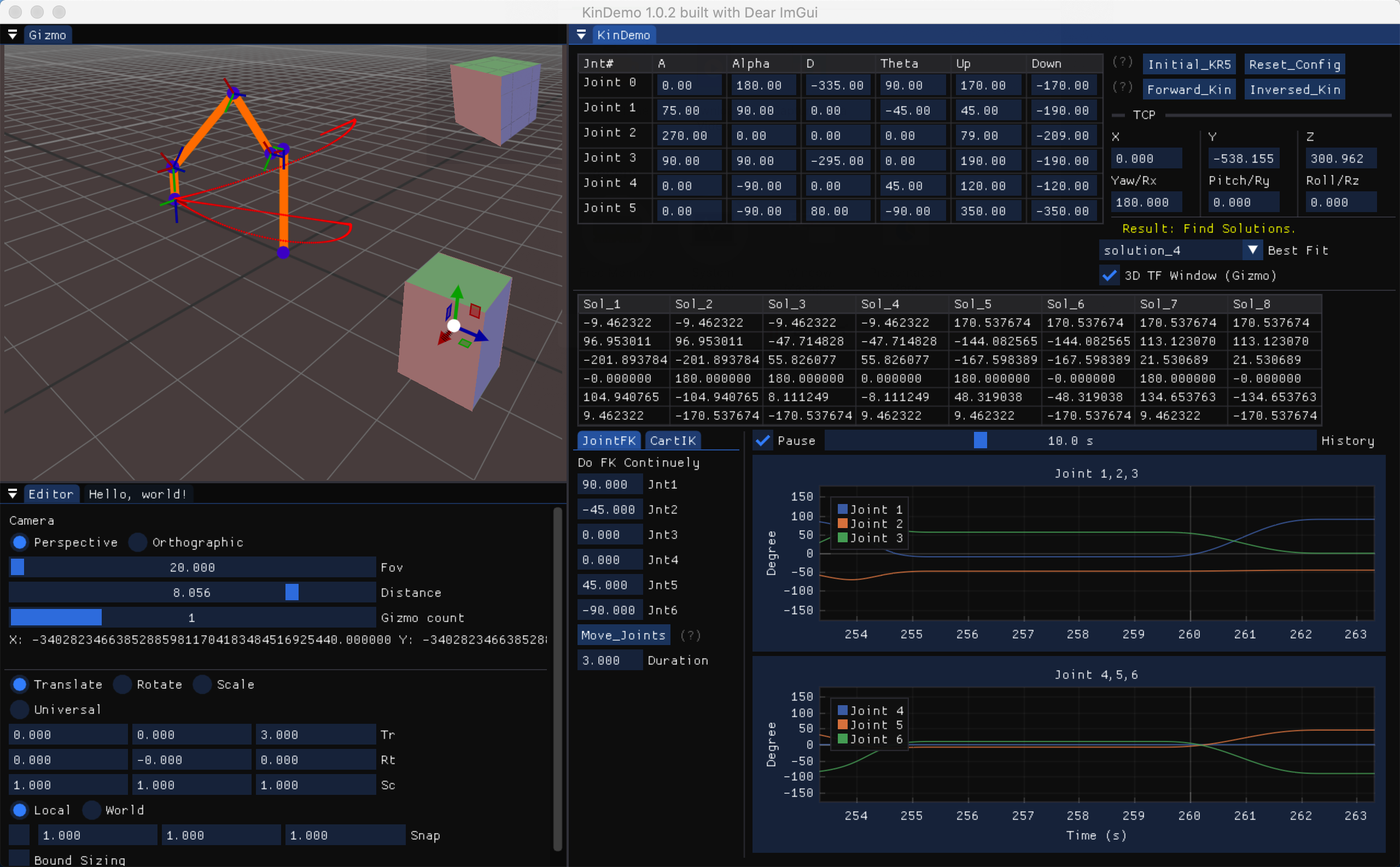
Kinematic of Redundant (7-axis) Robot arm
Kinematic of Redundant (7-axis) Robot armFor usual articulated (6-axis) serial robot arm, given the position and orientation of its end-effector, we can get (at most) 8 possible Inverse kinematic solutions.
While, for redundant (7-axis) robot arm, when the position and orientation of its tool center point (TCP) are given, it still has one DOF in its elbow to move arbitrarily for other purposes, such as avoiding obstacles.
In addition, the kinematic configuration of this kind of robot arms is ...
Kinematic of Serial Robot Arm
Here is the new version with source code and on-line demo.
Kinematic of Serial Robot ArmThis is my first work in Precision Machinery Center. I follow the instruction in [1] to write a MATLAB program to demonstrate the forward & inverse kinematic of 6-jointed robot arm.
In this program, user can enter the D-H parameter of the robot on upper left side. By Homogeneous Transformation Matrix, it can do forward kinematic to get the position and orientation of articulated type robot. The result i ...
Mechatronics - Stepper Motors Control
Mechatronics - Stepper Motors ControlOne of case studies at Mechatronics class at Columbia University taught by Dr. Fred R. Stolfi. The goal of this case study is get an understand of the issues and techniques for stepper motor control using an embedded microcomputer. Stepper motors are the preferred technology for position control system such as those in machine tools.The main apparatus includes:
A microcontroller, PIC16F74
A Microchip microcomputer board
Two permanent magnet stepper motors ...
Mechatronics - On/Off Temperature Control
Mechatronics - On/Off Temperature ControlOne of case studies at Mechatronics class at Columbia University taught by Dr. Fred R. Stolfi. This case study is a dynamic system investigation of an important and a common mechatronic system: a thermal close-loop system.
The main apparatus includes:
A microcontroller, PIC 16F74
A resistive heater (SRMU 100202P)
Two temperature sensor (AD590 and AD22100)
A fan.
The film of On/Off temperature control:
The specification of resistive heat ...
Robotic eye Mechanism Design
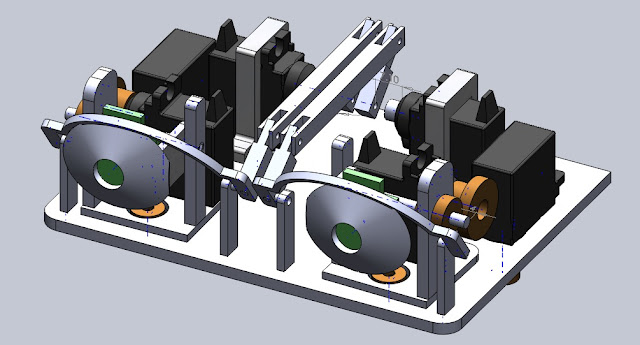
Robotic eye Mechanism DesignWorking as a research assistant in National Taiwan University (NTU), I worked on the project of developing a humanoid robotic eye.
Design a humanoid robotic eye mechanism with SolidWorks and use laser cutting machine to produce mechanical parts.
Assemble mechanical parts with RC motors, gears, and CCD into an eye mechanism.
The Film of eye mechanism during testing:
The figure of mechanism drawing by Solidworks:
The photos of real mechanism:
CAD files: https:/ ...
Team Project: Optimal design of elliptical (cross) trainer
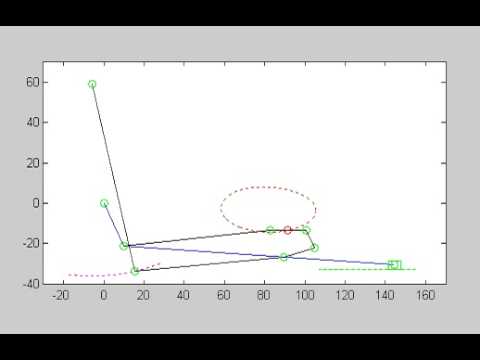
Optimal design of elliptical (cross) trainerThis was a team project I participated at Mechanism Design class at National Taiwan University. The goal of this project is optimize the design of elliptical trainer, which is one of fitness equipment we can can see in gym.
The following are what I did:
Analyzing and optimal designing of four-bar linkage (Home-use, cheap, and ineffective elliptical trainer)
Analyze of eight-bar linkage (effective and expensive elliptical trainer, which we can see i ...

Controlling iRobot Create with Matlab
Controlling iRobot Create with MatlabIt is a self-study case. This case refers to first homework project of COMS W4733 COMPUTATIONAL ASPECTS OF ROBOTICS taught by Prof. Peter Allen at Columbia University.
I use iRobot Open Interface to create a GUI interface in Matlab to control iRobot Create. The interface takes serial commands from a remote computer and executes them on the robot, returning sensor data as required. In addition, Professor Joel Esposito and Owen Barton at the United States Na ...